
GPS Sonde Sounding System
For Upper-air sounding operation

Ground Receiving System
Meisei ground system responds efficiently and cost-effectively to the operator’s requirements in upper air sounding operation. The lightweight and simple system is designed for easy integration/installation with improved efficiency.
- Easy integration/installation
- Easy preparation (Sonde check/Frequency setting) via infrared communication between Sonde checker and radiosonde
- Automatic antenna switching for optimum reception
- Indoor GPS repeater included
Main Components
Technical Specifications
Ground Receiver |
|
|---|---|
Weight |
Approx. 2 kg |
Size |
320(W) × 260(D) × 60(H) mm |
Frequency range |
400.00 - 406 MHz |
Tuning step |
100 kHz |
Power |
100 - 240 AC (or 12 DC) |
Communication |
LAN, Audio port |
Antenna |
|
Brown antenna |
> 2.15 dBi, < 100 km |
Yagi antenna |
> 7.65 dBi, < 250 km |
GPS antenna |
33 dB |
Radiosonde Check Unit |
|
Communication |
|
Power |
5 VDC via USB to PC |
Temperature sensor |
PT 100 JIS A class (JISC1604) |
Humidity sensor |
Capacitive |
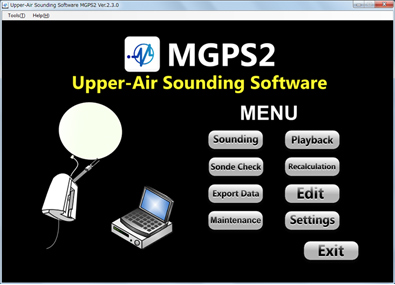
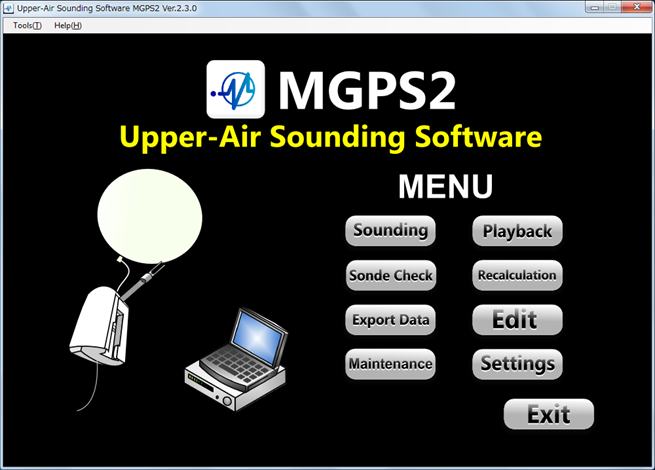
Sounding Software
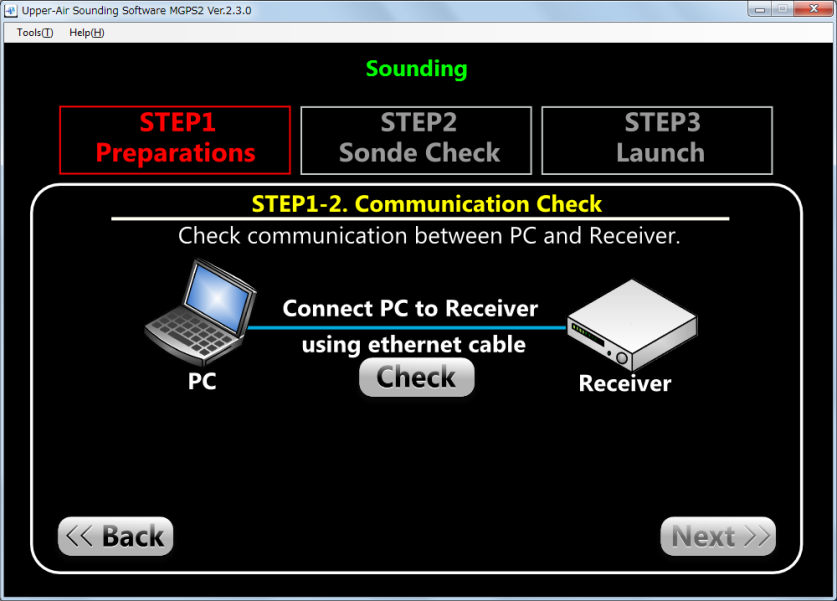
MGPS2 is easy to use sounding software even for non-trained operator supporting preparation, sonde check, launch, data collection and various meteorological messages through interactive interface. In addition to fundamental charts, various applications are provided such as Emagram, Skew-T, Hodograph and so on.
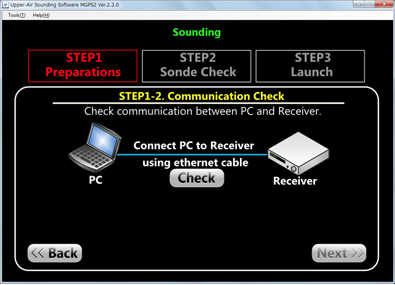
- Three (3) steps to facilitate sounding operation
- Quick five (5) minutes preparation
- Multiple graphical layouts displayed at the same time
- Sonde trajectory and landing estimation displayed on map
- Sound data reproduction for data restoration
-
Main menu of MGPS2
-
Three simple steps
Display layout examples
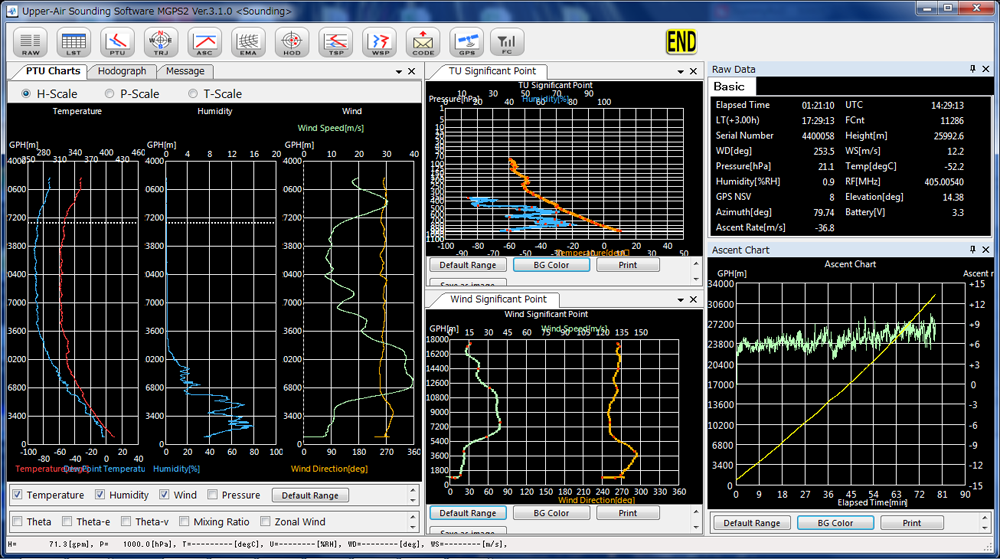
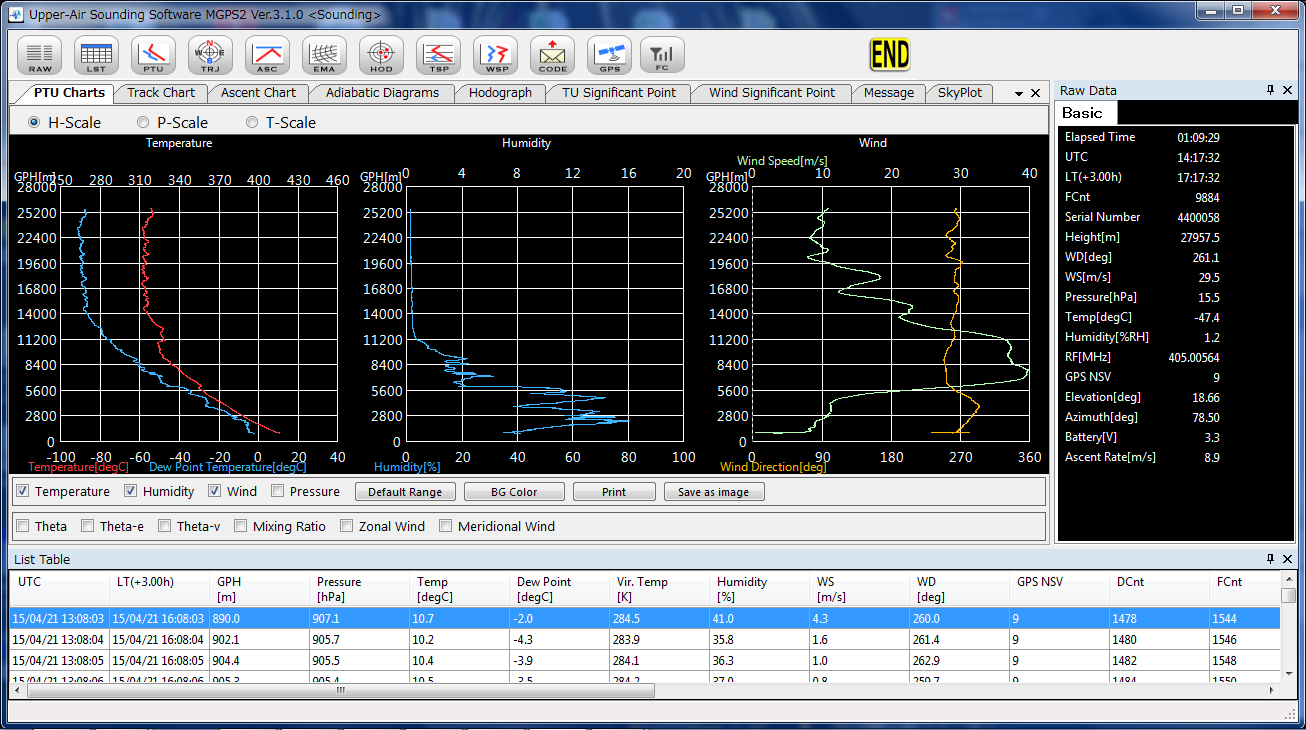
Graph types
Graphic Display |
Reference axis |
Remarks |
||
|---|---|---|---|---|
(hPa) |
(m) |
(min.) |
||
Pressure (hPa) |
N/A |
✔ |
✔ |
|
Height (m) |
N/A |
N/A |
✔ |
|
Humidity (%) |
✔ |
✔ |
✔ |
|
Temperature (℃) |
✔ |
✔ |
✔ |
Emagram Skew-T Tephigram Stuve |
Dew-point temperature (℃) |
✔ |
✔ |
✔ |
|
Wind direction (deg.) |
✔ |
✔ |
✔ |
|
Wind speed (m/s) |
✔ |
✔ |
✔ |
|
Potential temp. (K) |
✔ |
✔ |
✔ |
|
Equivalent potential temp. (K) |
✔ |
✔ |
✔ |
|
Virtual potential temp. (K) |
✔ |
✔ |
✔ |
|
Mixing ratio (g/kg) |
✔ |
✔ |
✔ |
|
Zonal wind (m/s) |
✔ |
✔ |
✔ |
Hodograph |
Meridional wind (m/s) |
✔ |
✔ |
✔ |
|
Ascending/descending ratio (m/s) |
N/A |
N/A |
✔ |
|
Sonde position Distance (km) and direction (deg.) |
N/A |
N/A |
N/A |
Track chart Landing Estimation |
Technical Specifications
PC (Work Station) |
|
|---|---|
CPU |
> CoreTM i3 |
Memory |
> 2 GB |
Communication |
> LAN×2, USB×1 |
Sounding Software MGPS2 |
|
Supporting OS |
> Windows 10 |
Display |
Raw data Table PTU chart Track chart Ascent chart Adiabatic diagrams (Emagram, Skew-T, Tephigram, Stuve) Hodograph TU significant point Wind significant point WMO Message GPS skyplot Frequency setting |
Output file |
CSV, KML |
WMO messages |
FM32 PILOT FM35 TEMP FM94 PILOT-BUFR (3’09’050, 3’09’051) TEMP-BUFR (3’09’052) FM75 CLIMAT-TEMP |